Unity Controller customized for use with bench-top mill conversions using a higher amp Z driver with NEMA34 motor options and the replacement of the fifth driver by two extra relays.
- Expandable to your needs, versatile, and flexible.
- Can be used for 2, 3, or 4 axis systems.
- Get it with or without motors
- Motors (if purchased) are pre-wired with 6 Feet of 5-Conductor 22 Gauge Motor Wire and XLR connectors
Have A Look Inside:
- 40Volt (110VAC Input) Linear Power Supply for the fastest motor operation
- Professionally wired, installed, mounted and tested electronics
- 4 Drivers, Breakout Board, IDC cables, and wired connector ports
- Full Enclosure with Power switch, fan, and fuses
- Modular and organized
Driver System:
- 3x 5.6Amp MondoStep Bipolar Drivers (X, Y, and A axis)
- 1x 7.8Amp MondoStep BiPolar Driver (Z axis)
Breakout Board:
The PBX-MX is an isolated parallel port breakout board for use with software such as LinuxCNC or Mach3.
Integrated back panel includes:
- Connections for up to 4 motors
- Connector for limit switches
- Connector for E-Stop
- Earth ground connection for improved EMI protection
- Auxilary 5v logic output that can drive an accessory like the Powerswitch Tail
- IEC power connections for the primary power and the router control relay
- Built in PWM to 0-10VDC analog signal interface for spindle speed control to a VFD or SuperPID.
- PBX-MX Isolated Parallel Port breakout board
- Two AC inputs
- Color coded
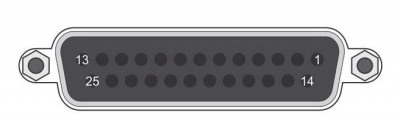
Pin-out
We recommend using LinuxCNC's coolant mist and flood for controlling Relays 1 & 2. This would provide M7 and M8 commands and on-screen checkboxes for control.
Note: These relays do not provide power, they simply open/close circuits.
|
1) 5VDC Relay 1
|
10) X Limit
|
| 2) X Step
|
11) Y1 Limit
|
| 3) X Dir
|
12) Y2 Limit
|
| 4) Y1 Step
|
13) Z Limit
|
| 5) Y1 Dir
|
14) 120VAC Relay
|
| 6) Z Step
|
15) E-stop
|
| 7) Z Dir
|
16) 5VDC AUX
|
| 8) Y2 Step
|
17) 5VDC Relay 2
|
| 9) Y2 Dir
|
18-25) GND
|
ESTOP

|
1) Pin 15
|
| 2) GND
|
LIMITS

|
1) X Limit (Pin 10)
|
| 2) GND
|
| 3) Y Limit (Pin 11)
|
| 4) GND
|
| 5) NC (Pin 12)
|
| 6) GND
|
| 7) Z Limit (Pin 13)
|
| 8) GND
|
VFD

|
1) 24V in from VFD
|
| 2) GND
|
| 3) 0-10V
|
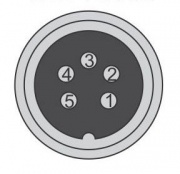
MOTOR
|
1) B-
|
| 2) B+
|
| 3) NC
|
| 4) A+
|
| 5) A-
|

|
1 & 2) Relay 1
|
| 3) NC
|
| 4 & 5) Relay 2
|
Example Config
Example LinuxCNC config: File:Unity-M2.zip






